|
|

|

|
| e-Pub |
Section: New Results
Neuroprostheses and technology
Abstraction and composition for formal design of neuroprotheses
Participants : Hélène Leroux, David Andreu, Karen Godary [LIRMM] .
In the framework of specification and implementation of complex digital systems on FPGA, we have developped an approach based on components whose behavior and composition are specified by generalized interpreted T-time Petri nets. One of the inherent difficulties for designer is, on the behavioral part, to account for exceptions. This often leads to a complex modeling and is a source of human errors. Indeed, it is intricate to express all the possible situations (i.e. current state of model). We have defined a way to model exception handling by integrating the well-know concept of macroplace into the formalism. The analysability of the model and the efficiency of the implementation on FPGA (reactivity and surface, ie number of logic blocks) have been preserved. An example of macroplace is given in figure 13; it contains a sub-net (set of places of its refinement) from which exception handling is simply described by a dedicated output transition (transition te on fig. 13), whatever is the current state of the sub-net.
The new formalism has been defined, as well as the model transformation based equivalent PNML generation for using existing analysis tools.
Ongoing work deals with solving state evolution conflicts introducing priorities between transitions, to avoid reaching inconsistent global state while synchronously executing the model.
New FES dedicated digital processor for neurostimulator
Participants : David Andreu, David Guiraud.
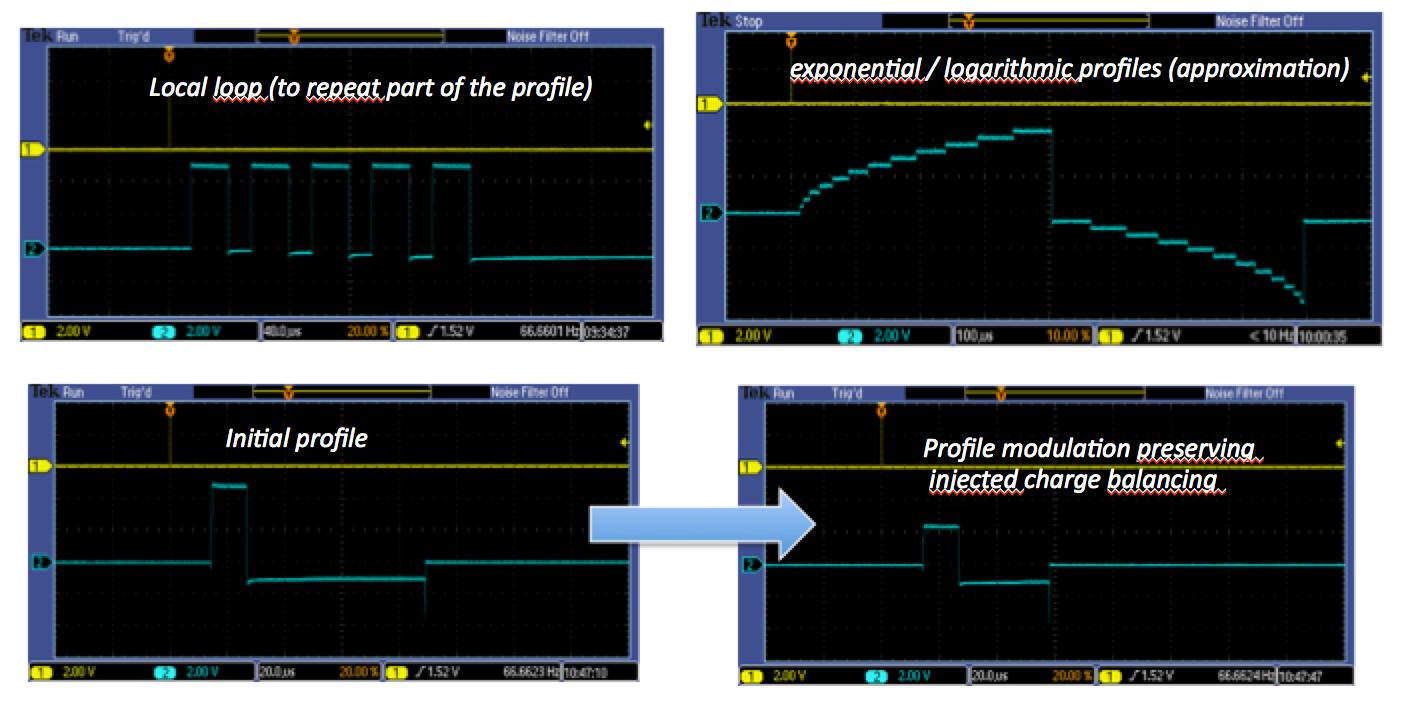
We designed (patent pending) and prototyped a new neural FES dedicated processor and its associated (more compact and efficient) set of instructions, as well as an embedded sequencer for accurate timing in sequencing stimulations to be performed (by the stimulator). The new neural stimulator is based on a dedicated ASIC (Application Specific Integrated Circuit), that is able to drive up to 24 channels of stimulation in absolute synchronization, and with a programmable and controlled current level distribution (patent pending). This ASIC also allows for impedance measurement. The functions of the stimulator are currently implemented in two separate chips: an analog stimulation front-end (ASIC) and a field-programmable gate array (FPGA) embedding the logic control. The FPGA embeds the new FES dedicated processor setting the output stage configuration (poles configuration and current ratio between them) and running potentially complex stimulation profiles (with a 1 µs time step and 5 µA current step); example of generated stimulations are shown in Figure 12 . It also embeds the protocol stack allowing for remote programming and online control. Online control relies on advanced and efficient modulation mechanisms, e.g. coefficient based modulation preserving balanced stimulation (Figure 12 ). And last but not least, it also embeds a monitoring module ensuring the respect of safety constraints stemming both from target tissue protection and electrode integrity preservation; this reference model based monitoring module ensures (configurable) current and quantity of injected charges limits and thus safe stimulation whatever are electrodes to be used (particularly for thin-film micro-electrodes). Safety limits must be defined by users (partners) according to the target and electrodes to be used.
Attitude reconstruction from IMU signals
Participants : Jonathan Peguet [IFMA] , Daniel Simon, Christine Azevedo Coste, Roger Pissard-Gibollet [SED Inria Grenoble Rhône-Alpes] .
Inertial Measurement Units (IMUs) are currently used by the team for real-time estimation of limbs attitude, e.g. as in section 6.2.2 where the attitude of a leg while walking feeds a agit phase estimator. The IMUs embedded in the FOX nodes (manufactured by HiKob) include 3 gyrometers, 3 accelerometers and 3 magnometers, from which the attitude (e.g. Euler angles) of the node can be computed. The raw measurement signals can be either processed locally in the nodes, or sent on wireless links to be processed on a remote computer.
The raw signals issued from sensors are subject to noise and bias. Additionally, the raw data flow can be corrupted by timing disturbancies induced by communication and computation. Hence, the attitude reconstruction filters must be robust against disturbancies such as noise, bias, jitter and data loss. To evaluate the robustness of attitude reconstruction filters, a software simulation package dedicated to IMUs design and analysis has been customized from the Imusim package (initially developed in Python under GPL at Univ. of Edinburgh, U.K. [44] ).
The Imusin modeling features include realistic IMUs models with noise and bias, calibration procedures, radio channels deficiencies and computing timing parameters. Several versions of Extended Kalman Filters and Non-Linear Observers, in particular those previously developed at Inria Grenoble Rhône-Alpes, have been integrated and succesfully tested against measuring noise. The work is supported by Inria SENSBIO ADT.
Fast simulation of hybrid dynamical systems
Participants : Abir Ben Khaled [IFPEN] , Daniel Simon, Mongi Ben Gaid [IFPEN] .
When dealing with the design of complex systems, simulation is an indisputable step between concept design and prototype validation. Realistic simulations allow for the preliminary evaluation, tuning and possibly redesign of proposed solutions ahead of implementation, thus lowering the risks. However, the simulation of high-fidelity models is time consuming, and reaching real-time constraints is out of the capabilities of monotithic simulations running on single cores.
The aim of the on-going work is to speed up the numerical integration of hybrid dynamical systems, eventually until reaching a real-time execution, while keeping the integration errors inside controlled bounds. The basic approach consists in splitting the system into sub-models, which are integrated in parallel. I has been shown that an efficient partition must minimize the interactions between sub-models, in particular by confining discontinuities processing inside each component. Automatic partitioning, based on some particular incidence matrices of the original system, has been investigated [17] . The method was tested with an automotive engine model, but it is generic and can be applied to other systems of hybrid ODEs/DAEs, as are large sets of muscular fibers.
ENG amplifier front-end
Participants : Mariam Abdallah, Fabien Soulier, Serge Bernard, Guy Cathébras.
Electroneurogram acquisition systems are usually based on tripolar cuff electrodes that are known to decrease noise from external sources, such as muscular fibers (EMG) or stimulation artifacts. Thus, we studied a preamplifier associated with this kind of electrode in a true-tripole configuration. It is designed at the transistor level to lower the number of transistors while still rejecting parasitical signals. This kind of integration reduces the size, power consumption and noise of the preamplifier compared to classical true-tripolar structures.
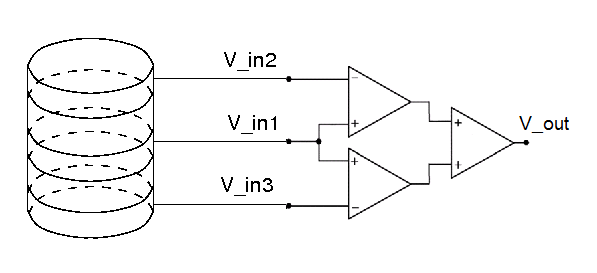
The true-tripole configuration consists of linear combination of signals coming from the three poles
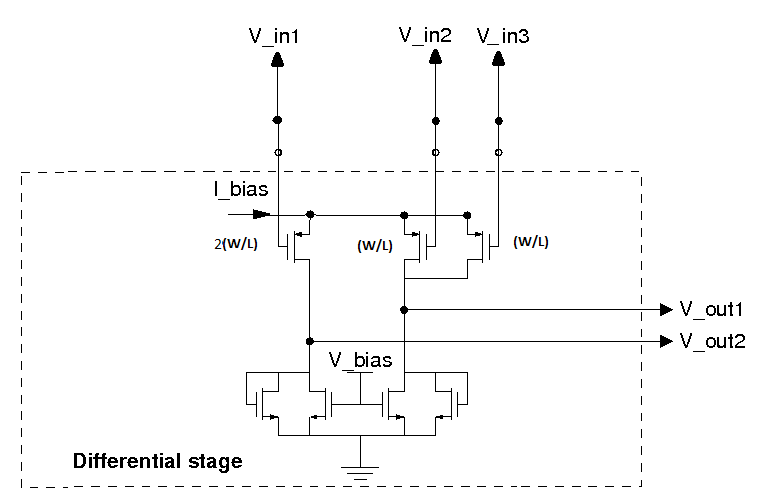
This combination is usually realized thanks to several differential amplifiers as shown in the figure 13 , whereas the proposed preamplifier is designes as a differential pair whose negative input transistor is split into only two smaller ones. (fig. 14 ). The circuit is based on a modified ASIC in AMS CMOS m technology, with V supply. The preamplifier provides three functions which are:
-
to combine the input signals as shown in the equation (1 ),
-
and to present a differential output to a variable-gain amplifier (not presented here, but integrated into the ASIC).
To characterize the three-input preamplifier, we have to define three orthogonal modes, starting with the main mode expected to be amplified
the common mode, and the differential parasitic mode expected to be as low as possible to achieve a good EMG rejection:
|
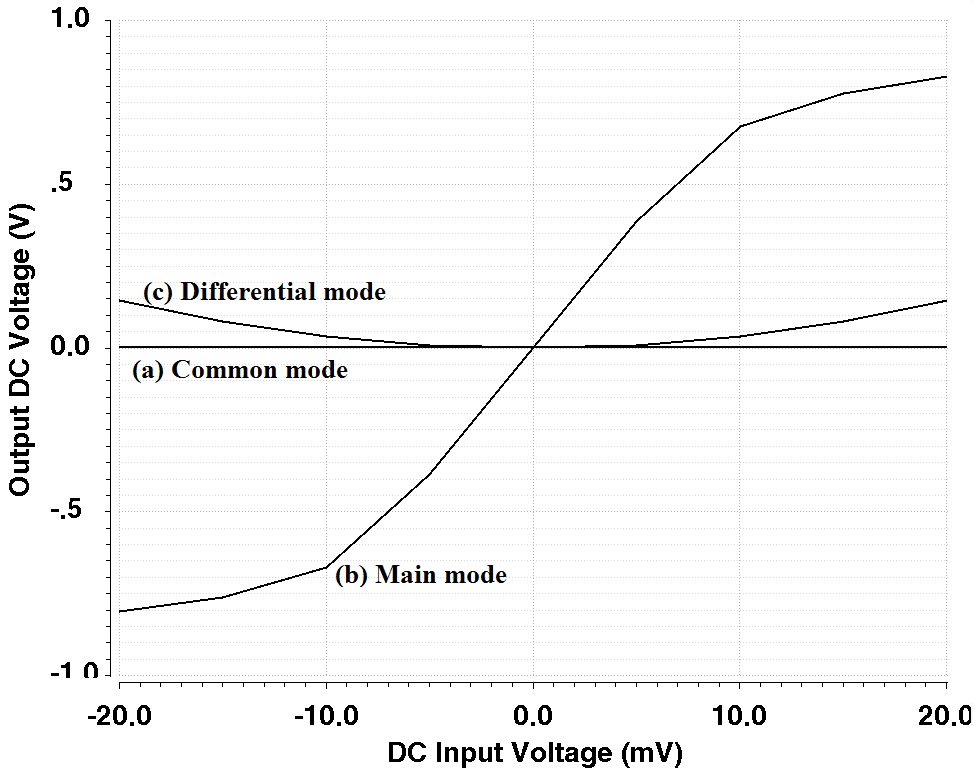
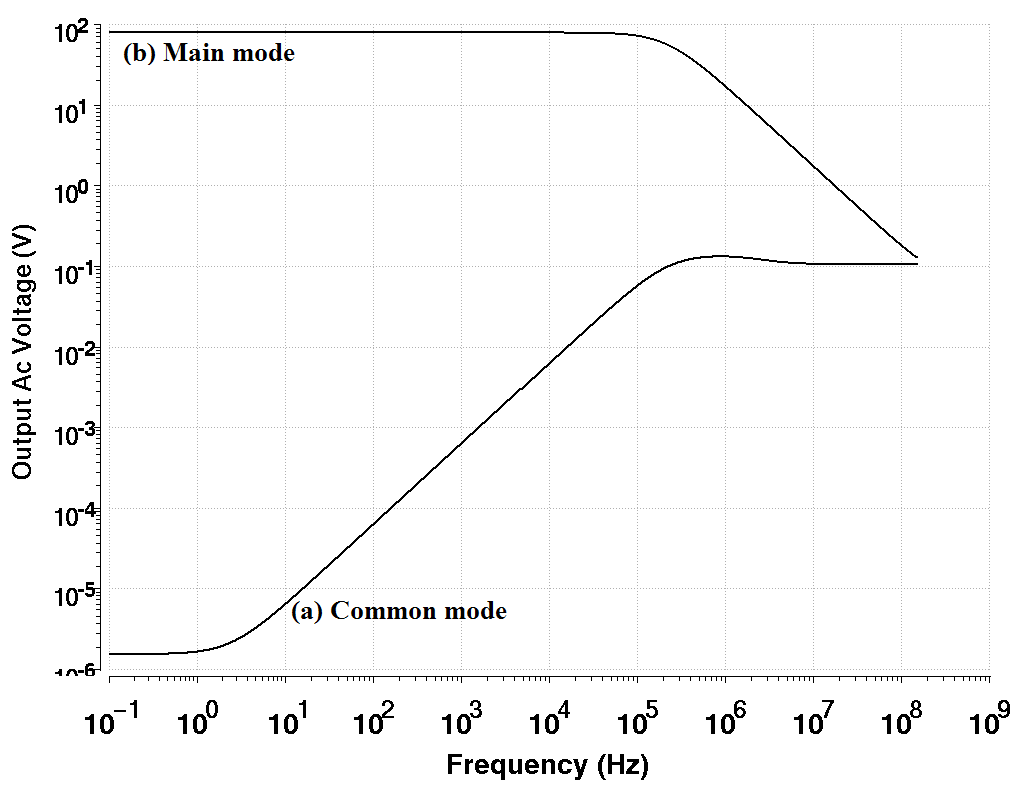
DC and AC simulations were performed for these three modes. The results are presented in the figure 15 . The main results of these simulations are:
-
more than 150 dB rejection ratio for the common and differential modes compared to main one,
-
200 kHz bandwidth (that is far above the needs for ENG acquisition),
-
the estimated flicker noise due to input and load transistors is below the V on the required bandwidth.
This work has been presented to the 18th IFESS Annual Conference [16] .
Characterization of the CAFE12 chip
Participants : Jérémie Salles, Fabien Soulier, Serge Bernard, Guy Cathébras.
The circuit CAFE12 (Cool Analog Front End, 12 poles) used in StimND, which was designed in 2006, exploit the bases of a DEMAR patent. A characterization of a circuit (1st version, manufactured in 2006-2007) showed limitations to its capabilities. Thus a 2nd version was designed and manufactured in 2012 to improve the circuit linearity and consumption. CAFE12 is an ASIC generating 12 current outputs. This ASIC was developed in high voltage CMOS technology (H35, Austria Mikro Systems). Each output is able to deliver/absorb a current as high as 5mA.
The measurements presented below were carried on 3 CAFE12_V2 prototypes (C8002 & C8003). Some comparisons with 2 CAFE12_V1 (T1201 & nD09) prototypes are also shown.
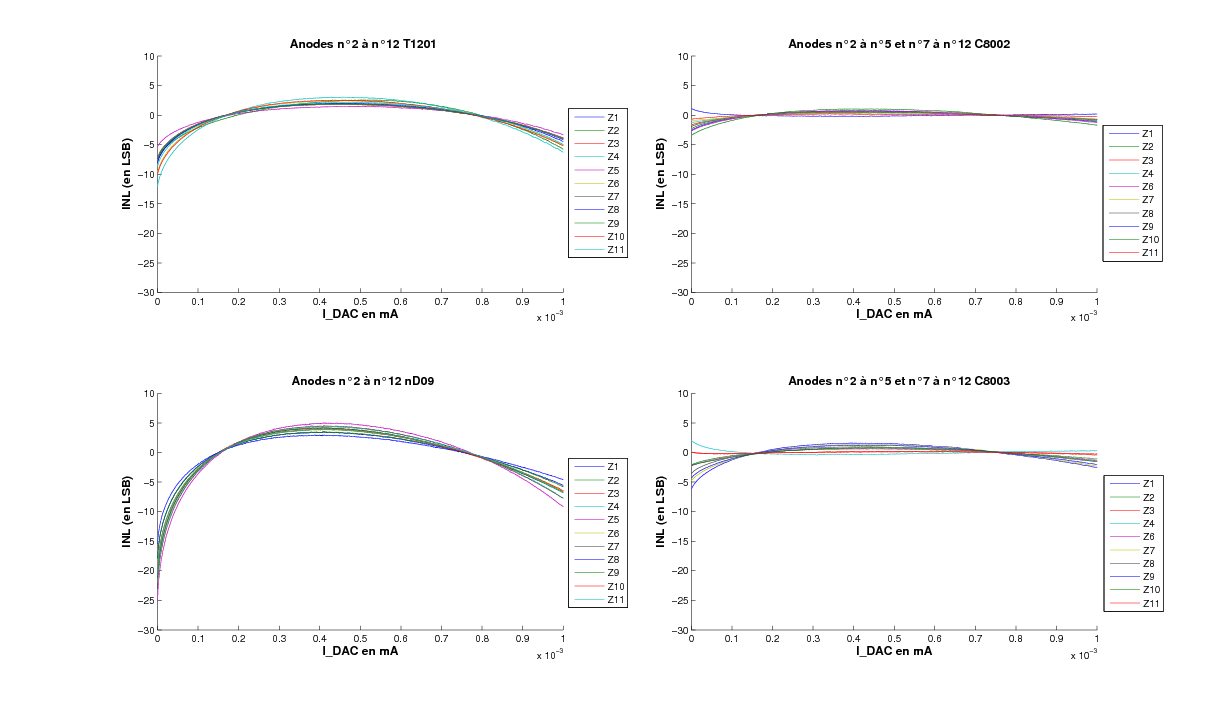
-
Integral non linearity (INL) Figure 16 highlights the INL improvement of the anodic generators. This significant decrease is due to a wiring modification on a specific operational amplifier (OPA). No improvement on the cathodic side was expected.
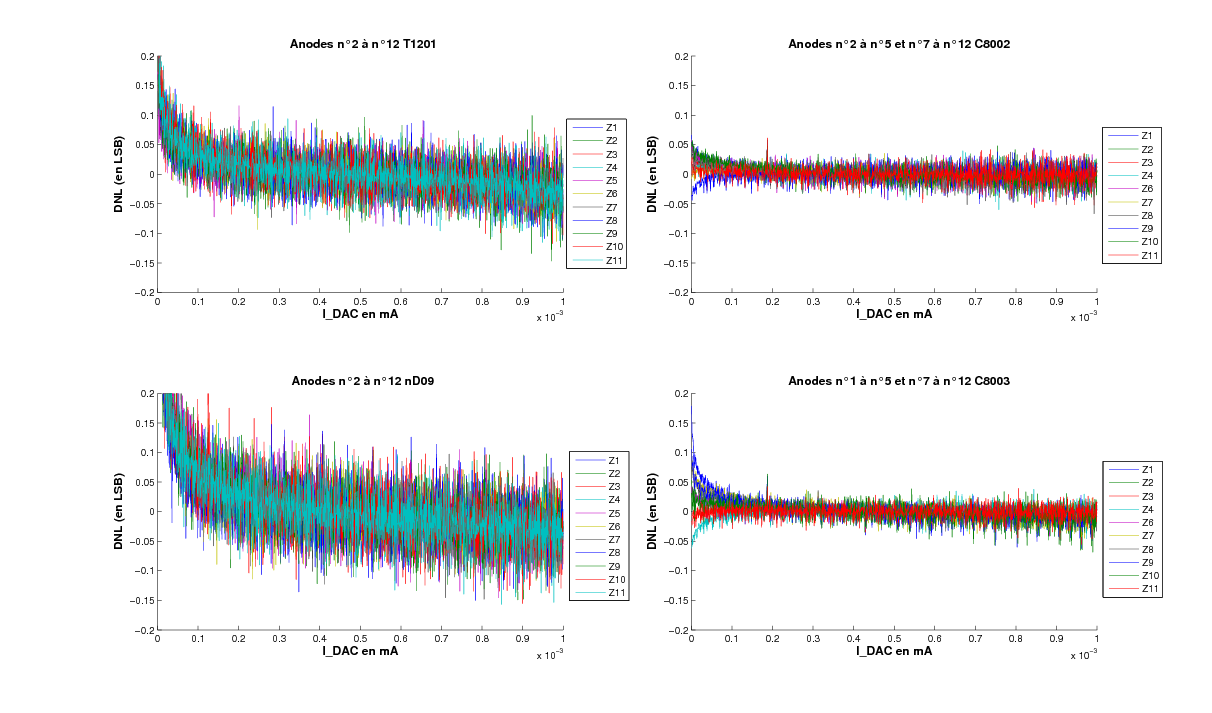
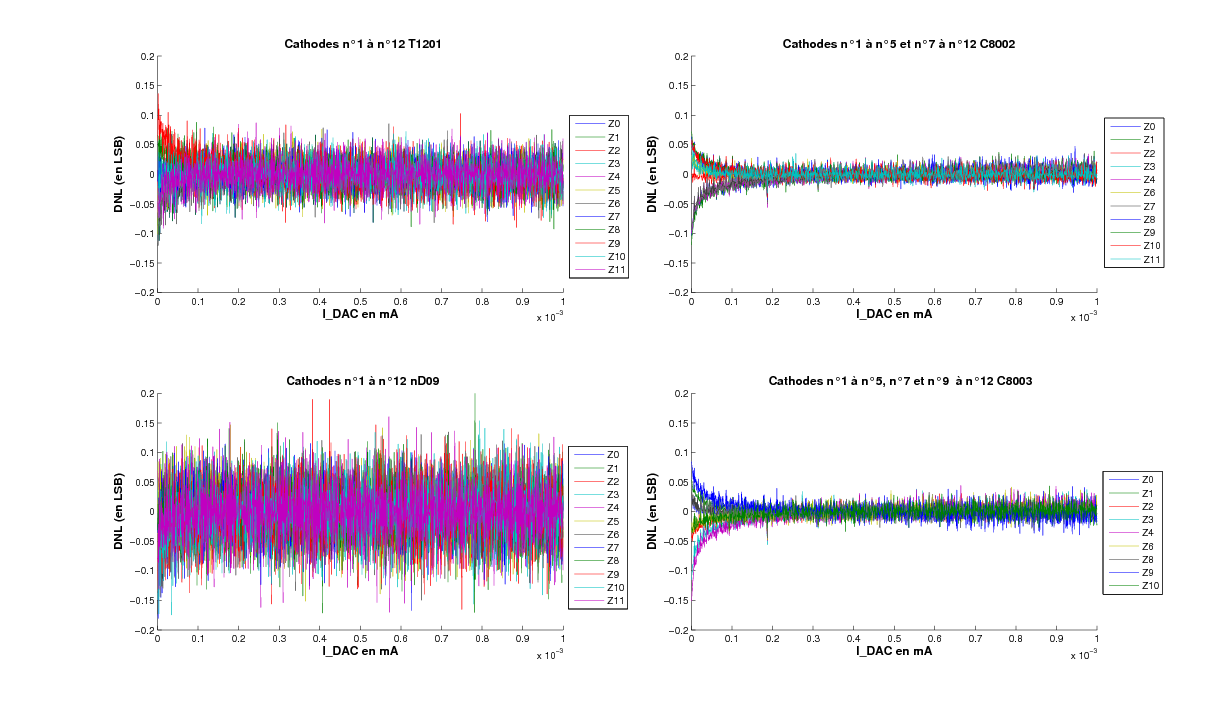
-
Differential non linearity (DNL) The noticed improvement on the INL is also noticeable on the differential non linearity on both anodic and cathodic sides (Figure 17 and Figure 18 ).
The following table 1 sums up the characterization results. The main achievements are better anodic generators (linearity and gain) and a reduced static consumption.